

Robotu Geliştirmek ve Uçuş Testleri Yapmak İçin İki Yıl Sürdü...
07:42:43
Havada Asılı Kalmak İçin Yapay Zekâ ve Jet İtiş Gücü Kullanıyor
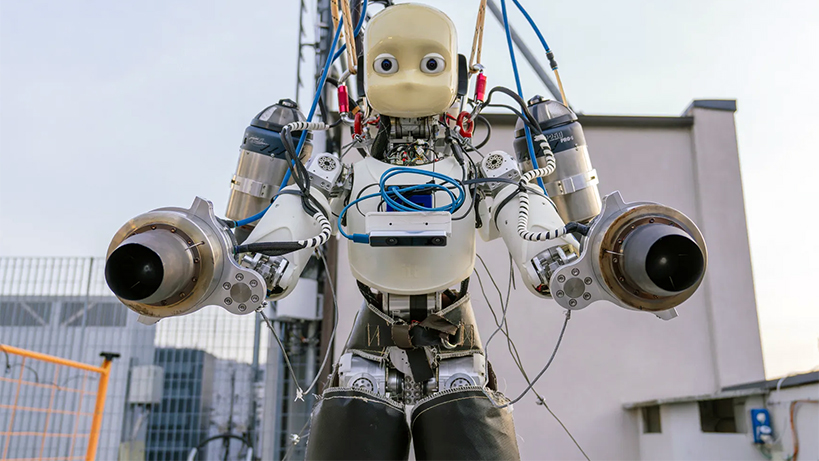
Jet türbinleri ve titanyum bir omurga ile inşa edilen İtalyan iRonCub3, havada yapay zekâ, aerodinamik ve insan benzeri hareketi harmanlayarak uçuşa geçiyor. Robotik alanında çığır açan bir gelişme olarak, İtalya’daki araştırmacılar dünyanın ilk jet motorlu insansı robotunu başarıyla fırlattılar. iRonCub3 adı verilen makine, yerden yaklaşık 50 santimetre yükseldi ve uçuş sırasında dengesini korudu…
İtalyan Teknoloji Enstitüsü (IIT) tarafından geliştirilen robot, hava hareketliliği ve insan benzeri bir yapı kullanarak gerçek dünya ortamlarında çalışmak üzere tasarlanmıştır.
Bu dönüm noktası, çok modlu robotikte bir sıçrama anlamına geliyor. Karasal hareket ile kontrollü uçuşu birleştirerek, karmaşık veya tehlikeli yerlerde gelecekteki kurtarma görevleri ve keşif görevleri için kapı açıyor.
Aşırı ortamlar için tasarlanmış
iRonCub3, üçüncü nesil iCub insansı robotunu temel alıyor ve uzaktan kumanda ediliyor. Dört jet motoru taşıyor, ikisi kollarında, ikisi sırt çantası ünitesinde.
Bu yapı, rüzgar veya fiziksel zorluklar olsa bile havada asılı kalmasını ve dengede kalmasını sağlıyor.
Robot 70 kg ağırlığında ve 1000 newton’dan fazla itme gücü üretebilir. Türbinler 800°C’de egzoz gazları dışarı atar, bu da yeni bir titanyum omurga ve ısıya dayanıklı koruyucu kaplamalar gerektiriyor.
Araştırma ekibi, robotu geliştirmek ve uçuş testleri yapmak için iki yıl harcadı.
IIT’nin Yapay ve Mekanik Zekâ (AMI) Laboratuvarı başkanı Daniele Pucci, “Bu araştırma, geleneksel insansı robotiklerden radikal bir şekilde farklıdır ve bizi en son teknolojiye göre önemli bir sıçrama yapmaya zorladı” dedi.
Gelişmiş kontrol ve AI entegrasyonu
Uçuş sırasında stabilite önemli bir zorluktu. Simetrik ve kompakt olan dronların aksine, iRonCub3 hareketli uzuvlara ve uzun bir gövdeye sahiptir. Bu özellikler, değişken aerodinamik ve dinamik bir kütle merkezi yaratıyor.
Bunu çözmek için araştırmacılar yeni uçuş kontrol modelleri ve gerçek zamanlı aerodinamik tahmincileri geliştirdiler. IIT ekibi, rüzgar tüneli testleri için Milano Politeknik Üniversitesi ile, makine öğrenimi uygulamaları için ise Stanford Üniversitesi ile işbirliği yaptı.
Makalenin ilk yazarı Antonello Paolino, “Modellerimiz, simüle edilmiş ve deneysel verilerle eğitilmiş sinir ağlarını içerir ve istikrarlı uçuşu garanti etmek için robotun kontrol mimarisine entegre edilmiştir” dedi.
Bu yapay zekâ destekli sistemler, iRonCub3‘ün uçuş sırasında türbülanslı hava akımlarına ve değişen uzuv pozisyonlarına tepki vermesini sağlıyor. Robot ayrıca, kalkış sırasında sıralı jet ateşlemesi veya yapısal hareket gibi hızlı geçişleri de yönetebiliyor.
Ortak tasarım hassasiyeti artırıyor
Araştırmacılar, iRonCub3‘ü oluşturmak için ortak tasarım yaklaşımını kullandılar. Bu yöntem, robotun şeklini ve motor yerleşimini aynı anda optimize etmelerini sağladı. Amaç, aşırı termal ve aerodinamik koşullara dayanırken maksimum uçuş kontrolünü sağlamaktı.
Robotun sistemlerini ince ayarlamak için çok sayıda simülasyon ve deneysel test yaptılar. İyileştirmeler arasında itme sensörleri, ısı yönetimi ve otomatik kalkış/iniş planlayıcıları yer alıyordu.
Kurtarma ve keşif alanlarında gelecekteki uygulamalar
İlk uçuş testleri, robotun başarıyla havada asılı kaldığı IIT‘nin kapalı laboratuvarında gerçekleştirildi. Gelecekteki testler, Aeroporto di Genova ile işbirliği içinde kurulan Cenova Havalimanı‘ndaki özel uçuş alanına taşınacak.
iRonCub3 gibi uçan insansı robotlar, afet bölgelerinde, zehirli ortamlarda veya hem uçuş hem de manipülasyon gerektiren görevlerde kullanılabilir.
Bu içeriği beğendiyseniz lütfen çevrenizle paylaşınız…
Senin İçin Tavsiye Ediliyor


